Recently, the Director of Robotics Lab of Our School, Prof. Xiaoping Chen’s Team published a paper with the title of Hierarchical Control of Soft Manipulators towards Unstructured Interactions on The International Journal of Robotics Research (IJRR), the top academic journal in the Robot field. This is the first paper for our university with USTC as the only institute.
Prof. Xiaoping Chen's research group broke through limitations of rigid robotic arms, and used soft-bodied robotic arms to solve robotic manipulation problems in unstructured scenes with uncertainties. Inspired by the way humans perform manipulation tasks, they utilized the inherent compliance of soft-bodied robotic arms to propose a new paradigm of interaction between robots and environments, which makes soft-bodied robotic arms able to perform various tasks in daily life as easily as humans, without the need for modeling the environments precisely in advance or sensors to sense environmental contact force. Even being artificially interfered during the execution does not affect the completion of the task.
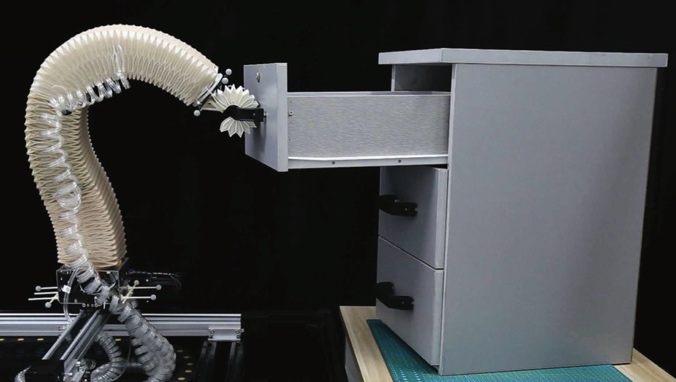
The HPN Arm performing a task of opening a drawer.
Currently, most soft-bodied robots, such as soft grippers, underwater soft-bodied robots, and soft-bodied surgical robots, are mainly made of soft materials such as sillicone. Movement of this kind of robots is generated by deformation of soft materials, which is actuated by methods such as pressurized fluid and shape-memory alloy. This kind of robots is limited by their material characteristics, making it very hard for them to achieve large load capacity. In nature, elephant trunks are soft organs that are both flexible and strengthful. Regarding the issues above, the research group proposed a structure called Honeycomb Pneumatic Networks (HPN) in 2013, and based on which fabricated a soft-bodied robotic arm with both flexibility and large load capacity like an elephant trunk. Because of the inherient compliance and continuous deformation characteristics, HPN arms have great research value and application prospects in fields such as intelligent manufacturing, medical rehabilitation, and home services.
Hao Jiang, PhD candidate of our school is the first author of this paper, and Xiaoping Chen is the corresponding author. This research was supported by National Natural Science Foundation, Doctoral Fund of the Ministry of Education, and USTC directional project fund.
Paper Link: https://doi.org/10.1177/0278364920979367
